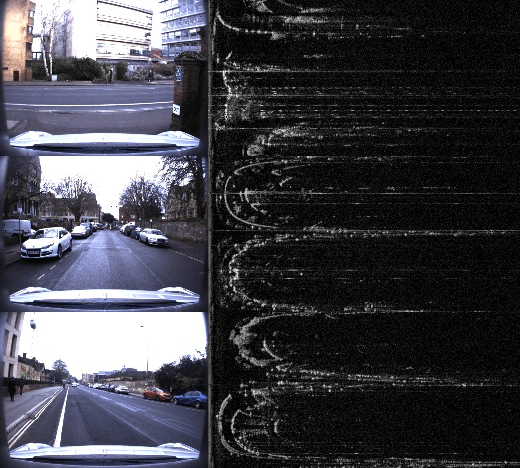
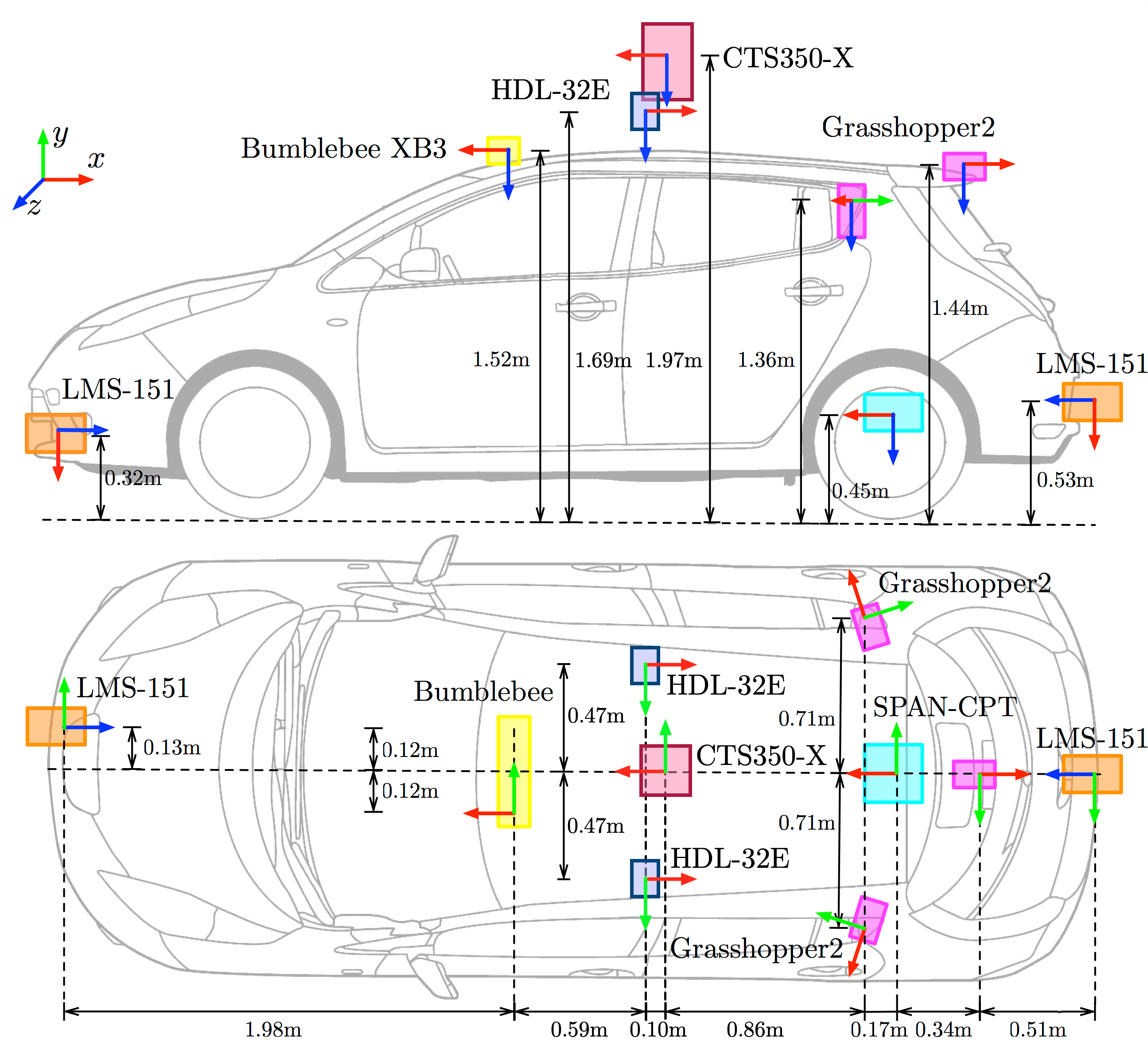
The Oxford Radar RobotCar Dataset is a radar extension to The Oxford RobotCar Dataset. We provide data from a Navtech CTS350-X Millimetre-Wave FMCW radar and Dual Velodyne HDL-32E LIDARs with optimised ground truth radar odometry for 280 km of driving around Oxford, UK (in addition to all sensors in the original Oxford RobotCar Dataset).
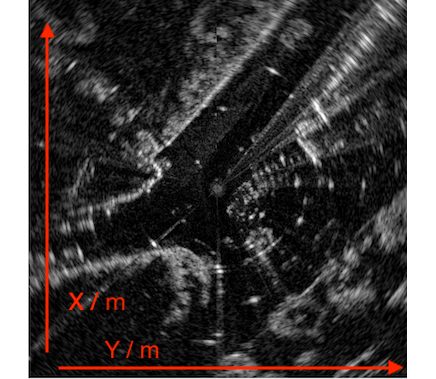
Our radar is a Navtech CTS350-X Millimetre-Wave Frequency-Modulated Continuous-Wave (FMCW) scanning radar and in the configuration used provides 4.38 cm in range resolution and 0.9 degrees in rotation resolution with a range up to 163 m, all whilst providing robustness to weather conditions that may trouble other sensor modalities.
We are excited to share this data with the community and we intend that this dataset will help accelerate research in this interesting modality.
|
|
|
| Datasets | Documentation | Examples |
| View or download datasets | How to use the data | Sample uses of the dataset |
| Read More | Read More | Read More |
Citation
If you use this dataset in your research, please cite both of the following papers:
The Oxford Radar RobotCar Dataset: A Radar Extension to the Oxford RobotCar Dataset
Dan Barnes, Matthew Gadd, Paul Murcutt, Paul Newman and Ingmar Posner
[Paper]
[Video]
@inproceedings{RadarRobotCarDatasetICRA2020,
address = {Paris},
author = {Dan Barnes and Matthew Gadd and Paul Murcutt and Paul Newman and Ingmar Posner},
title = {The Oxford Radar RobotCar Dataset: A Radar Extension to the Oxford RobotCar Dataset},
booktitle = {Proceedings of the IEEE International Conference on Robotics and Automation (ICRA)},
url = {https://arxiv.org/abs/1909.01300},
pdf = {https://arxiv.org/pdf/1909.01300.pdf},
year = {2020}
}
1 Year, 1000km: The Oxford RobotCar Dataset
W. Maddern, G. Pascoe, C. Linegar and P. Newman
The International Journal of Robotics Research (IJRR), 2016
[Paper]
@article{RobotCarDatasetIJRR,
Author = {Will Maddern and Geoff Pascoe and Chris Linegar and Paul Newman},
Title = {{1 Year, 1000km: The Oxford RobotCar Dataset}},
Journal = {The International Journal of Robotics Research (IJRR)},
Volume = {36},
Number = {1},
Pages = {3-15},
Year = {2017},
doi = {10.1177/0278364916679498},
URL =
{http://dx.doi.org/10.1177/0278364916679498},
eprint =
{http://ijr.sagepub.com/content/early/2016/11/28/0278364916679498.full.pdf+html},
Pdf = {https://robotcar-dataset.robots.ox.ac.uk/images/robotcar_ijrr.pdf}}
Licence
This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License and is intended for non-commercial academic use. If you are interested in using the dataset for commercial purposes please contact us.